此測試頁面包含一些基本運動功能,可用來測試軸是否正確移動。
於專案設定窗格點選一個軸,然後點選設定窗格中的「測試」頁籤以開啟此頁。欲開始測試所選的軸,點擊右上方的「啟用」按鍵;您亦可從「裝置」下拉選單選擇一個軸並啟用它。

主題:
傳送與讀取

位於設定、測試及調校頁面的「傳送」與「讀取」按鍵是連動的,意旨若在任一頁面改變了與軸相關的某些設定,相關的改變將在其他頁面被標註。更多關於按鍵的資訊請見 設定 > 傳送與讀取。
在測試頁面中,與「傳送」和「讀取」相關的設定為原點回歸。
傳送:將新值套用到 KINGSTAR 子系統,點擊「傳送」以後,設定工具將提醒您設定將改變。
讀取:讀取 KINGSTAR 子系統的值,點擊「讀取」以後,設定工具將提醒您所讀取的值將會覆寫欄位中的值。
輸入
目標 / 距離:運動的目標位置或相對距離。
速度:速度。
加速度:加速度。
減速度:減速度。
加加速度:加加速度。
設定工具中所有的運動參數皆受單位轉換(測試設定區域)與加速度單位 (設定 > 運動) 影響。更多關於加速度單位的運作方式請見:概念解說 > 運動曲線類型。
| 單位/秒 | 延遲(秒) | |
|---|---|---|
| 單位轉換 (開) |
目標/距離:使用者單位 速度:使用者單位/秒 加速度:使用者單位/秒2 減速度:使用者單位/秒2 加加速度:使用者單位/秒3 加加加速度:使用者單位/秒4 |
目標/距離:使用者單位 速度:使用者單位/秒 加速度:秒 減速度:秒 加加速度:秒 加加加速度:秒 |
| 單位轉換 (關) |
目標/距離:計數 速度:計數/秒 加速度:計數/秒2 減速度:計數/秒2 加加速度:計數/秒3 加加加速度:計數/秒4 |
目標/距離:計數 速度:計數/秒 加速度:秒 減速度:秒 加加速度:秒 加加加速度:秒 |
原點回歸
設定軸的原點回歸模式。點擊 ![]() 以展開原點回歸選項。
以展開原點回歸選項。

設定
反轉 開/關:反轉感測器值,未勾選表示當感測器在高位(開)則被視為有觸動;勾選表示當感測器在低位(關)視為有觸動。
數位輸入:
編輯:從模組清單中選擇數位輸入。
刪除:移除所選的數位輸入。
驅動器回歸方法:使用伺服驅動器的原點回歸功能。更多關於伺服驅動器的原點回歸方法,請參照其使用說明書。
驅動器回歸偏移量:軸找到原點感測器後移動的距離。
參數
回歸模式:原點回歸模式,選項包含 探針式 (Homing Latch)、接觸式 (Homing Soft)、訊號式 (Homing Sensor)、驅動器 (Homing Slave)、 就地 (Homing On Position) 與 驅動器手動 (Manual Homing Slave) 模式。
方向:原點回歸方向,選項包含 正、負。
末速度:原點回歸移動的末速度,使用方式依原點回歸模式而定。
動作
用來測試軸的基本動作。

向後寸動與向前寸動
可在不指定目標位置下測試速度,可選擇向後或向前寸動,此運動對應至 IAxis.Jog。
欲執行寸動運動,按住向後寸動或向前寸動圖標以開始寸動,放開滑鼠即可停止。
原點
命令軸執行"尋找原點"序列,此功能對應至 IAxis.Home。
欲執行原點運動,直接點擊該圖標。
絕對位置
絕對位置按鍵可用來命令一個控制運動到達指定的絕對位置,其對應至 IAxis.MoveAbsolute。
欲執行絕對位置,直接點擊該圖標。
注意:啟用模數軸時,絕對位置 指令將採用最短路徑到達目標位置。
向後與向前
向後與向前按鍵可用來下達一個相對運動命令,以將一個特定距離加入目前指令位置。此運動對應至 IAxis.MoveRelative。
欲執行向後與向前運動,直接點擊該圖標。
來回運動
此運動與 相對位置 相似,對應至 IAxis.MoveRelative,不同之處在於軸將來回移動,距離由輸入中的目標 / 距離決定。
欲執行 來回運動,直接點擊該圖標,再次點擊可停止來回運動。
停止動作
停止動作。
軸狀態與值
軸移動的結果將顯示於此。
軸
|
實際位置:實際位置。啟用模數軸時,此值將被轉換為模數值,並於下方顯示模數刻度指示器。 實際速度:實際速度。 實際扭矩:實際扭矩。 追蹤誤差:追蹤誤差。 控制模式:控制模式,欲檢視控制模式的完整名稱,將滑鼠游標移至顯示的模式名稱上方。更多資訊請見 McControlMode。 狀態:軸狀態。更多資訊請見 AxisState。 |

|
LED
|
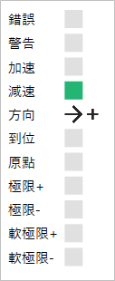
顏色與訊號:
錯誤:軸錯誤。 錯誤代碼:
警告:軸警告。 加速:加速度。 減速:減速度。 方向:方向。若軸在下列狀態則此圖標不會顯示:離線、CommunicationError、MotionError、停用、StandStill。
到位:到達位置。 原點:原點回歸開關。 極限+:正極限開關。 極限-:負極限開關。 軟極限+:正軟體極限開關。 軟極限-:負軟體極限開關。 |
|
 :正。
:正。 :負。
:負。參見